确定扫描场景的几何参数———非标准圆轨迹#
这段代码演示了使用ASTRA工具箱进行计算机断层成像(CT)重建的基本流程,主要功能包括:
创建CT扫描的几何参数配置(扫描几何+重建体积几何)
生成Shepp-Logan仿体(测试图像)
通过GPU投影运算生成正弦图(sinogram)
可视化原始图像和投影数据
1. 导入工具包#
python文件的第一步通常是引入所需要的包
import astra
import numpy as np #python主要的矩阵数据处理库
import pylab #用于可视化
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
Cell In[1], line 3
1 import astra
2 import numpy as np #python主要的矩阵数据处理库
----> 3 import pylab #用于可视化
ModuleNotFoundError: No module named 'pylab'
2. 确定几何#
我们需要根据实际场景确定工程的几何参数设置.以下面图片展示的场景为例子
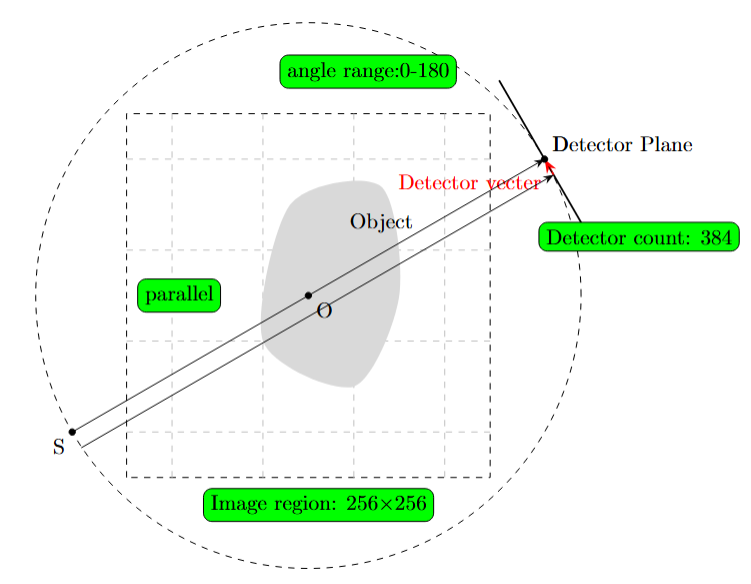
在这个场景中,光源和探测器位置由实际测量得到,可能不是标准圆轨迹
#生成模拟实测数据
proj_geom = astra.create_proj_geom(
'parallel', # 使用平行光束(如老式CT)
1.0, # 探测器间距1像素
384, # 有384个探测单元
np.linspace(0, np.pi, 180, False) # 从0到180°拍180张(每1° 1张),False表示不包含终点
)
vectors=np.zeros([180,6])
for i in range(180):
# ray direction
vectors[i,0] = np.sin(proj_geom['ProjectionAngles'][i])
vectors[i,1] = -np.cos(proj_geom['ProjectionAngles'][i])
# center of detector
vectors[i,2] = 0
vectors[i,3] = 0
# vector from detector pixel 0 to 1
vectors[i,4] = np.cos(proj_geom['ProjectionAngles'][i]) * proj_geom['DetectorWidth']
vectors[i,5] = np.sin(proj_geom['ProjectionAngles'][i]) * proj_geom['DetectorWidth']
vectors[0,:]
array([ 0., -1., 0., 0., 1., 0.])
#体积参数
vol_geom = astra.create_vol_geom(256, 256)
#投影参数
proj_geom = astra.create_proj_geom(
'parallel_vec', # 使用扇形束
384, # 有384个探测单元
vectors
)
#创建投影器
proj_id = astra.create_projector('cuda', proj_geom, vol_geom)
# 'cuda'表示使用NVIDIA显卡加速
#生成模拟实测数据
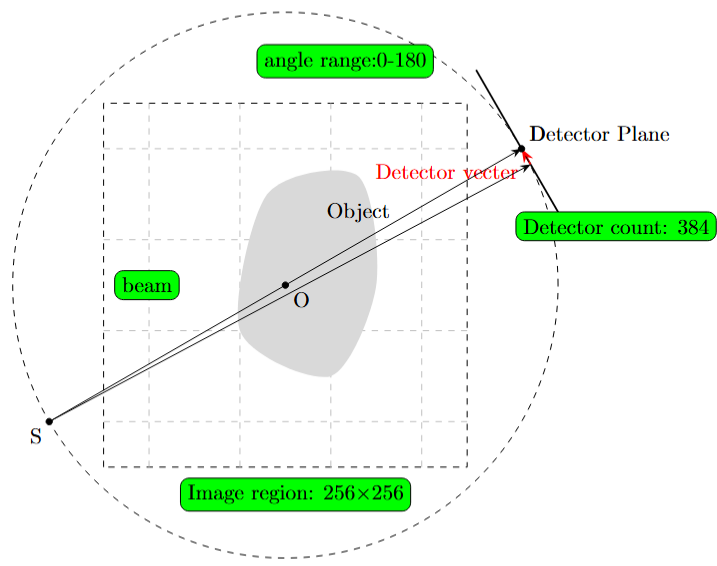
proj_geom = astra.create_proj_geom(
'fanflat', # 使用扇形束
1.0, # 探测器间距1像素
512, # 有384个探测单元
np.linspace(0, np.pi, 180, False),# 从0到180°拍180张(每1° 1张),False表示不包含终点
512, #光源到成像中心的距离
512 #探测板中心到成像中心
)
vectors2=np.zeros([180,6])
for i in range(180):
# source
vectors2[i,0] = np.sin(proj_geom['ProjectionAngles'][i]) * proj_geom['DistanceOriginSource']
vectors2[i,1] = -np.cos(proj_geom['ProjectionAngles'][i]) * proj_geom['DistanceOriginSource']
# center of detector
vectors2[i,2] = -np.sin(proj_geom['ProjectionAngles'][i]) * proj_geom['DistanceOriginDetector']
vectors2[i,3] = np.cos(proj_geom['ProjectionAngles'][i]) * proj_geom['DistanceOriginDetector']
# vector from detector pixel 0 to 1
vectors2[i,4] = np.cos(proj_geom['ProjectionAngles'][i]) * proj_geom['DetectorWidth']
vectors2[i,5] = np.sin(proj_geom['ProjectionAngles'][i]) * proj_geom['DetectorWidth']
vectors2[0,:]
array([ 0., -512., -0., 512., 1., 0.])
#体积参数
vol_geom = astra.create_vol_geom(256, 256)
#投影参数
proj_geom2 = astra.create_proj_geom(
'fanflat_vec', # 使用扇形束
384, # 有384个探测单元
vectors2
)
#创建投影器
proj_id2 = astra.create_projector('cuda', proj_geom, vol_geom)
# 'cuda'表示使用NVIDIA显卡加速
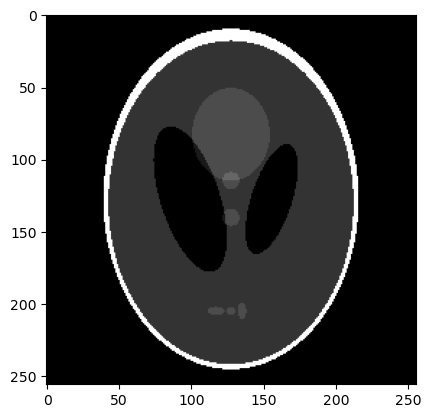
3. 生成测试图像#
Shepp-Logan仿体是国际公认的CT测试模型:
phantom_id, P = astra.data2d.shepp_logan(vol_geom)
# phantom_id : 数据对象ID
# P : 实际的256×256像素图像数据
#可视化
pylab.gray() # 使用灰度图显示
pylab.figure(1)
pylab.imshow(P)
<matplotlib.image.AxesImage at 0x75d8656b1580>
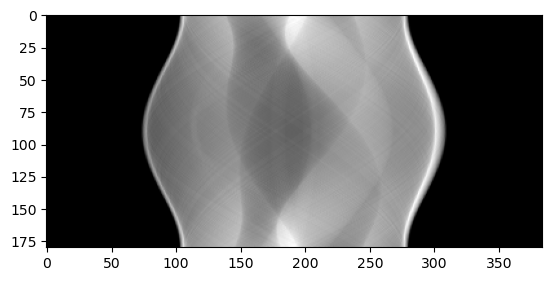
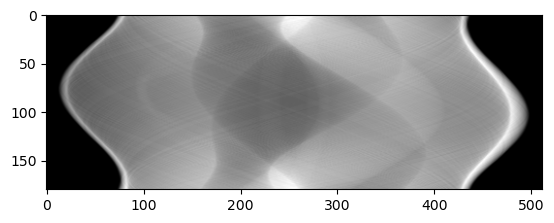
4. 正投影模拟#
接下来我们要计算这个几何条件下的正投影弦图。当扫描架以等角步进(Δθ=1°)旋转时,512个探测单元以1mm间距同步采集穿透仿体的衰减信号,最终形成180×512的投影矩阵
sinogram_id, sinogram = astra.create_sino(P, proj_id)
# sinogram : 生成的180×512正弦图数据
sinogram.shape
(180, 384)
pylab.figure(2)
pylab.imshow(sinogram) # 显示CT扫描结果(像扇形展开的胶片)
pylab.show()
sinogram_id2, sinogram2 = astra.create_sino(P, proj_id2)
# sinogram : 生成的180×512正弦图数据
sinogram.shape
(180, 384)
pylab.figure(2)
pylab.imshow(sinogram2) # 显示CT扫描结果(像扇形展开的胶片)
pylab.show()
5. 清理内存#
ASTRA会在GPU上分配内存,需要手动释放
astra.data2d.clear()
astra.projector.clear()