确定扫描场景的几何参数———以2维扇形束为例#
这段代码演示了使用ASTRA工具箱进行计算机断层成像(CT)重建的基本流程,主要功能包括:
创建CT扫描的几何参数配置(扫描几何+重建体积几何)
生成Shepp-Logan仿体(测试图像)
通过GPU投影运算生成正弦图(sinogram)
可视化原始图像和投影数据
1. 导入工具包#
python文件的第一步通常是引入所需要的包
import astra
import numpy as np #python主要的矩阵数据处理库
import pylab #用于可视化
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
Cell In[1], line 3
1 import astra
2 import numpy as np #python主要的矩阵数据处理库
----> 3 import pylab #用于可视化
ModuleNotFoundError: No module named 'pylab'
2. 确定几何#
我们需要根据实际场景确定工程的几何参数设置.以下面图片展示的场景为例子
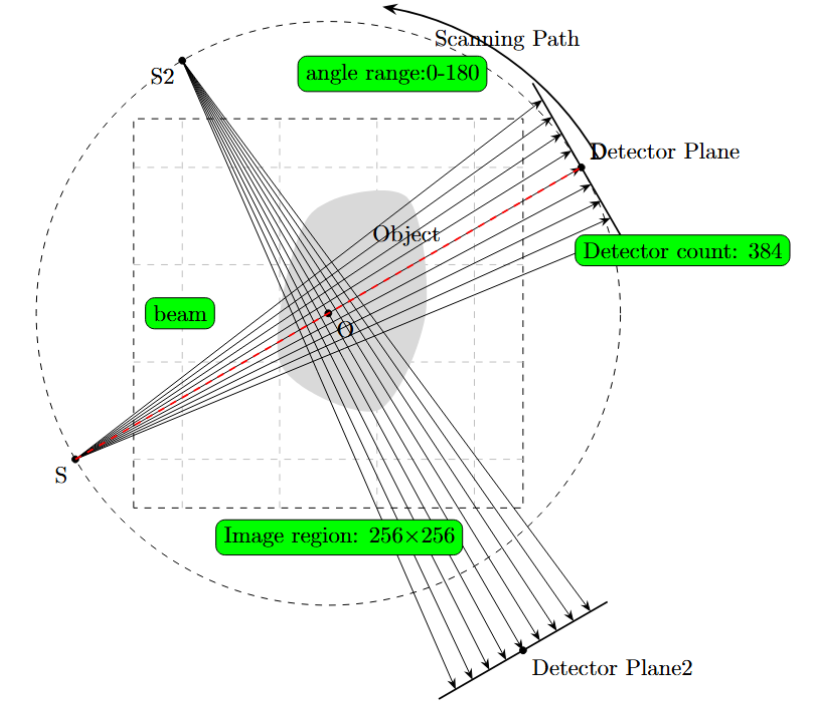
与平行束CT扫描系统不同,在扇形束成像中,光源到成像中心的距离以及探测板中心到成像中心的距离也会影响成像
#体积参数
vol_geom = astra.create_vol_geom(256, 256)
#投影参数
proj_geom = astra.create_proj_geom(
'fanflat', # 使用扇形束
1.0, # 探测器间距1像素
512, # 有384个探测单元
np.linspace(0, np.pi, 180, False),# 从0到180°拍180张(每1° 1张),False表示不包含终点
512, #光源到成像中心的距离
512 #探测板中心到成像中心
)
#创建投影器
proj_id = astra.create_projector('cuda', proj_geom, vol_geom)
# 'cuda'表示使用NVIDIA显卡加速
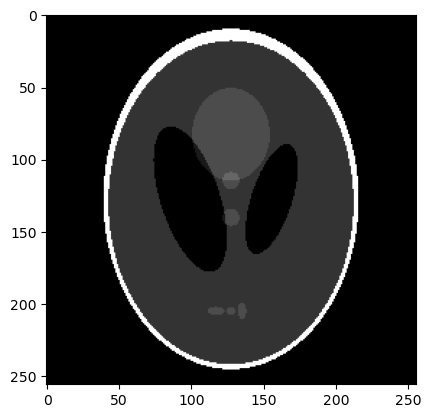
3. 生成测试图像#
Shepp-Logan仿体是国际公认的CT测试模型:
phantom_id, P = astra.data2d.shepp_logan(vol_geom)
# phantom_id : 数据对象ID
# P : 实际的256×256像素图像数据
#可视化
pylab.gray() # 使用灰度图显示
pylab.figure(1)
pylab.imshow(P)
<matplotlib.image.AxesImage at 0x799dc6aabcd0>
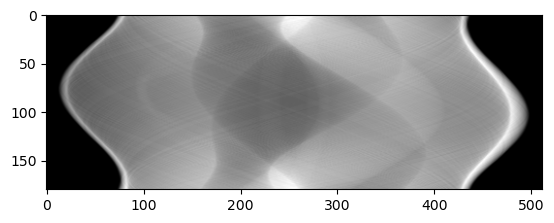
4. 正投影模拟#
接下来我们要计算这个几何条件下的正投影弦图。当扫描架以等角步进(Δθ=1°)旋转时,512个探测单元以1mm间距同步采集穿透仿体的衰减信号,最终形成180×512的投影矩阵
sinogram_id, sinogram = astra.create_sino(P, proj_id)
# sinogram : 生成的180×512正弦图数据
sinogram.shape
(180, 512)
pylab.figure(2)
pylab.imshow(sinogram) # 显示CT扫描结果(像扇形展开的胶片)
pylab.show()
5. 清理内存#
ASTRA会在GPU上分配内存,需要手动释放
astra.data2d.delete(sinogram_id)
astra.data2d.delete(phantom_id)
astra.projector.delete(proj_id)